


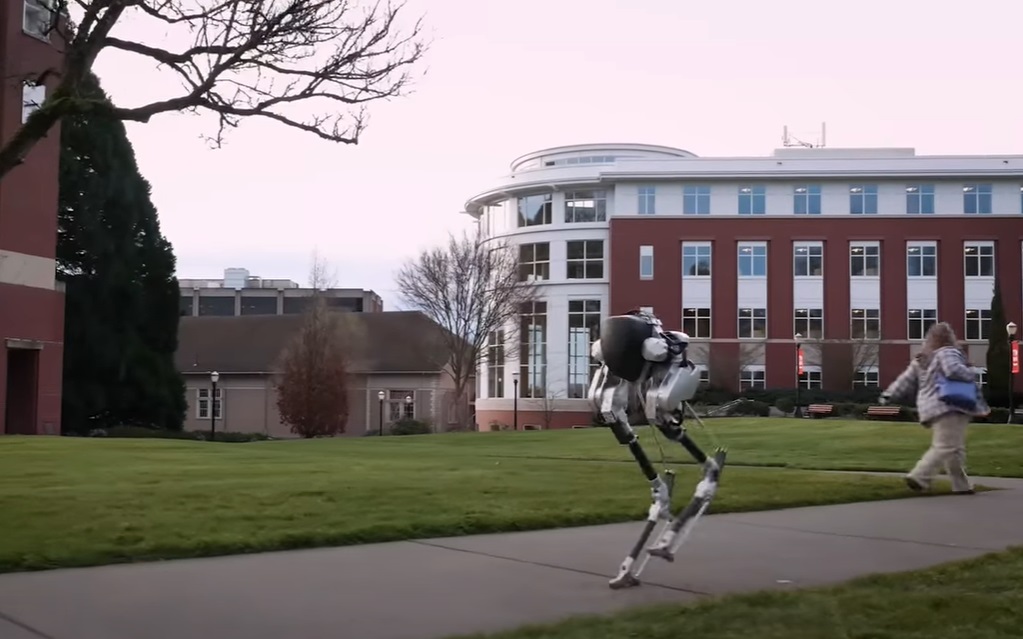
Робот Кејси, изумљен на Државном универзитету Орегон (ОСУ), а произведен од стране компаније сарадника, Аџилити Роботикс, ушао је у историју прешавши самостално 5 километара за нешто више од 53 минута.
Кејси је развијен под вођством професора роботике Џонатана Хурста са 16-месечним грантом од 1 милион долара додељеним од Агенције за Напредне Одбрамбене Пројекте (ДАРПА).
Од када је Кејси представљен 2017. године, у сарадњи са професором вештачке интелигенције Аланом Ферном, студенти ОСУа, финансирани од стране Националне Научне Фондације и програма ДАРПА “Машин Комон Сенс“, истражују опције машинског учења за робота.
Кејси, први двоножни робот који је користио машинско учење за управљање ходом на отвореном терену, завршио је пешачење од 5 км у кампусу државе Орегон без каблова и са једним пуњењем батерије.
“Студенти лабораторије за динамичку роботику на Инжењерском факултету ОСУ комбиновали су експертизу из биомеханике и постојеће приступе управљања роботима са новим алатима за машинско учење“, рекао је Хурст, који је 2017. године био суоснивач Аџилити Роботикса.
“Ова врста холистичког приступа омогућиће животињске нивое перформанси. Невероватно је узбудљиво”, каже Хурст.
Кејси, са коленима која се савијају попут оних код нојева, научио је да трчи по ономе што је познато као алгоритам учења са дубоким појачањем.
Трчање захтева динамичко балансирање, способност одржавања равнотеже при промени положаја са једног на други у покрету, а Кејси је научио да врши бесконачна суптилна прилагођавања како би остао усправан током кретања.
Преузмите андроид апликацију.







